Next: 6 -Schnittstellenkarte Up: 5 Ausgewählte Komponenten Previous: 4 Richtungssteuerung Contents
Die Wahl des Mikrocontrollers (Absch. 5.1) ermöglicht die Langzeitspeicherung von Werten auch bei ausgeschalteter Anlage (EEPROM-Speicher). Dadurch ist eine Winkelmessung mit einem Inkrementalgeber möglich, da durch die Speicherung der ,,letzten Position'' immer der Bezug zu einem vordefinierten bzw. programmierbaren Bezugswinkel herstellbar ist. Zu berücksichtigen ist aber, dass in allen geplanten Betriebsarten (Automatikbetrieb, Handbetrieb, ...) zuverlässig alle Schritte mitgezählt werden und die Endlage der Drehbewegung im Permanentspeicher abgelegt wird.
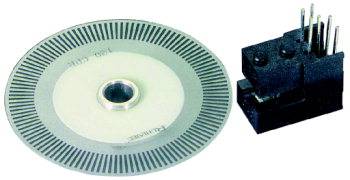
Man entschied sich für eine einfache Gabellichtschranke mit optischer Taktscheibe der Firma Sharp (Abb. 5.3).
In Abbildung 2.2 ist zu sehen, dass das Winkelmesssystem (Pos. 15) die einzige direkt in die Mechanik integrierte Komponente darstellt. Die Koppelung des Elektromotors an die Drehvorrichtung geschieht über die Abtriebswelle des Motorgetriebes. Diese treibt über zwei Zahnräder direkt die Filterhalterung der Drehvorrichtung an.
Die beiden Zahnräder weisen eine Zähnezahl von 11 Zähnen (Ritzel) und 66 Zähnen (Abtrieb) auf.
Daraus ergibt sich eine Antriebsübersetzung von:
Die Taktscheibe ist direkt auf der Abtriebswelle des Motorgetriebes montiert und führt somit 6 Umdrehungen während einer Filterumdrehung aus. Bei 120 Takten pro Getriebewellenumdrehung errechnet sich die effektive Messauflösung in Winkelgrad über die Formel:
Auf die Filteroberfläche umgerechnet ergibt dies nach Abb. 5.4
bei einem Filterkorb-Durchmesser von ![]() eine definierte Wegstrecke
auf der Filteroberfläche und somit die Messgenauigkeit bezogen auf
den Messtakt.
eine definierte Wegstrecke
auf der Filteroberfläche und somit die Messgenauigkeit bezogen auf
den Messtakt.
Damit ist die geforderte Messgenauigkeit von ![]() aus Absch. 4.4
erfüllt.
aus Absch. 4.4
erfüllt.
Hinweis:
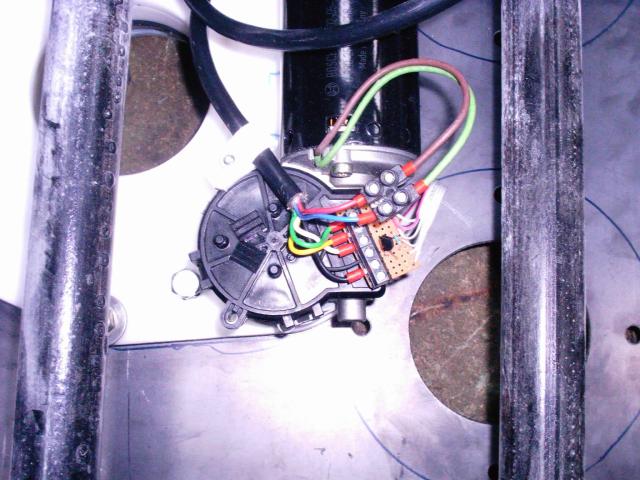
Diese Komponente ist als einziger elektronischer Bauteil in die Anlage integriert und erfordert umfangreiche Montagearbeiten bei Änderungen, Reparaturen, ... (Abb. 5.5).
gerhard.reithofer@tech-edv.co.at
![\includegraphics[%
width=3cm]{graphics/Winkelgenauigkeit.eps}](img59.png)